FIDIC is an international agency that formulates conditions of contract recommended for construction works where tenders are invited on an international basis. FIDIC conditions of contract are also widely used in domestic projects with minor modifications. FIDIC is the abbreviation of Fédération Internationale Des Ingénieurs-Conseils, meaning International Federation of Consulting Engineers in French. Different forms of FIDIC conditions of contract are commonly known as the Red Book, Silver Book, Yellow Book, Pink Book, Green Book, Blue Book, White Book, Gold Book etc.
The 1999 Suite of FIDIC Standard Conditions of Contract
Conditions of Contract for Construction – The New Red Book
Conditions of Contract for Plant and Design Build – The New Yellow Book
Conditions of Contract for EPC Turnkey Projects – The Silver Book
Short Form of Contract – The Green Book
The FIDIC Contracts Guide (2000)
Traditional FIDIC Conditions of Contract
Conditions of Contract for Works of Civil Engineering Construction – Red Book Fourth Edition (1987)
Conditions of Contract for Electrical and Mechanical Works including Erection on Site -Yellow Book Third Edition (1987)
Conditions of Contract for Design-Build and Turnkey – Orange Book First Edition (1995)
For more information visit
https://www.unep.fr/energy/activities/eca/pdf/ws3/philipjenkinson_fidic.pdf
https://en.wikipedia.org/wiki/FIDIC
More Articles in Civil Engineering
Are Contractors Entitled for Variations in Lump Sum Contracts? – Read Article
What is Day Work in Construction Contracts? – Read Article
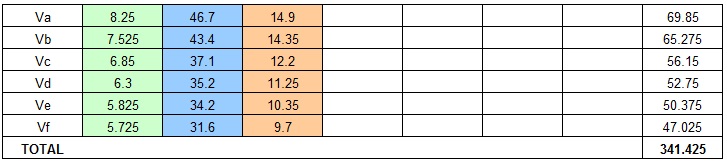
How to Calculate Earthwork Volume Using Simpson’s Rule? – Read Article
What is Contingency Allowance in a Construction Contract? – Read Article
What is Clause 14 programme? – Read Article
What is FIDIC? – Read Article
What is Prime Cost Sum in Construction Contracts? – Read Article
What is Provisional Sum in Construction Contracts? – Read Article
What is TOR Steel? – Read Article
Search engine keywords
FIDIC, FIDIK, FEDIC, FIDIC Contrac, FIDIC Red Book, FIDIC Silver Book, FIDIC Green Book, FIDIC Orange Book, FIDIC Yellow Book